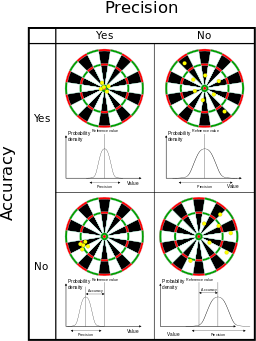
前情報としてAccuracy(正確さ)、Precision(精度)の話を挟ませていただきます。誤差はランダムな誤差と規則的な誤差の二種類に分けることができます。計測、予測の世界においては下図の様にランダムな誤差の大きさをAccuracy(正確さ)、規則的な誤差の大きさをPrecision(精度)と呼びます。
GNSSの測定する位置と速度の精度の話に入らせていただきます。GNSSから得られる情報には様々なものがあります。この中で容易に得られる成形された情報としてNMEAというフォーマットに沿った情報があります。このフォーマットの中には位置と速度が含まれています。しかしながらこの位置と速度を導き出される過程はとても異なるものとなっています。
GNSSはGNSSはなぜ都心で精度が悪くなりやすいのかに書いた通りGNSS受信機の位置を、GNSS受信機一台と地球の衛星軌道上の人工衛星三基を結んでできる三角錐から受信機の位置を連立方程式によって解く手法によって測定しています。最近はRTK-GNSSによるcm級測位などが話題となっておりますが、この手法による誤差は10m~20mほどです。(受信環境、受信信号を用いた計算に対する工夫、他技術を交えることによって市販されている様々なGNSS受信機における実際の誤差はもっと少ないものが多いです)一方で、GNSS受信機の速度はドップラ効果から測定されます。これは信号を受け取った時点の波長と発信された時点の信号の波長のずれから速度を計算するという手法です。こちらの手法はとても精度がよく、水平速度精度0.36m/sec、垂直速度精度0.72m/secとなっています。RTK-GNSS以前からcm単位で語れる誤差があったわけです。
一見、このドップラ効果を用いた測定された速度を積算することによって位置を推定したならばとても誤差の小さい位置の推定ができるように思えます。ここでAccuracy(正確さ)、Precision(精度)の話が出てきます。このドップラ効果によって測定された速度の誤差が小さいことは述べた通りです。しかしながら、積算のみによる位置の推定には完璧なAccuracy(正確さ)が求められてしまいます。これは上図の左下のような偏りがわずかでもあった場合、偏りが膨らみ続け大きな誤差を生むことになることが原因です。これによってドップラ効果から得られた速度の積算のみによる位置の推定には問題があるわけです。
ネガティブな意見を述べましたが、現実にこのドップラ効果による速度は高精度であり、この高精度速度を利用して得られた位置の誤差はRTK-GNSSを用いずとも2、3m程度になります。この位置と速度を組み合わせてより正確な位置を求めることに使われている技術の主となるのがカルマンフィルタと呼ばれる技術です。カルマンフィルタはGNSSのみならず制御工学、宇宙工学、経済学などで広く使われる優れた技術です。


